Ubemannede farkoster og droner kommer til å dominere framtidens krigføring til havs. Men hvordan skal Nato få roboter og systemer fra 32 ulike land til å samarbeide?

En mild høstbris blåser over havnebyen Sesimbra like sør for Lisboa i Portugal.

I området er det akkurat nå 18 skip, 46 ubemannede ubåter, 20 ubemannede båter og 39 droner fra 23 ulike nasjoner.

Deltagerne er der for å finne ut hvordan Nato kan bli bedre på maritim krigføring med roboter og ubemannede systemer.

Sammen tester de ulike metoder for minejakt, overvåking av kritisk infrastruktur under vann, anti-ubåtkrigføring, kartlegging av farvann og skulte operasjoner.
«Team Norway»
Norge deltar på øvelse REPMUS med soldater fra Marinen, forskere fra FFI og personell fra KONGSBERG. Med seg har de den autonome undervannsfarkosten Hugin, droneradarer, den FFI-utviklede sensoren Nilus for overvåking under vann og et kommunikasjonssystem for å dele informasjonen robotene og sensorene henter inn. I tillegg er Frigg, FFIs ubemannet overflatefarkost, med.
– Norge skal ta i bruk et system for minemottiltak basert på ubemannede farkoster. Å delta i denne øvelsen er en viktig del av å teste og videreutvikle dette utstyret, sier orlogskaptein Bjarte Haugsvær i Sjøforsvaret. Han mener det er unikt at aktører fra industri, Sjøforsvaret og forskning samarbeider så tett som i den norske delegasjonen.
Stian Kongsvik Berge fra KONGSBERG har hatt jobben med å koordinere det norske bidraget. Han har selv bakgrunn fra Sjøforsvaret.
– Dette er en veldig attraktiv arena for å vise frem vår teknologi og kapabilitetene produktene kan gi, sier Berge.
– Det er en mulighet til å sammenligne oss med andre aktører i markedet og ta med oss verdifull lærdom hjem for potensiell videreutvikling av våre systemer.


Allierte styrker er på vei. Et havområde må klareres. Det haster. Skjuler det seg miner eller andre trusler under overflaten?

Hugin, en autonom undervannsfarkost sendes ut for å kartlegge innseilingen til havnen der de allierte styrkene og forsyningene skal i land.
Tempoet må opp
I et hvitt telt på Forte do Cavalo i utkanten av Sesimbra står kommandør Stefan Pahl fra den tyske marinen og orienterer en delegasjon fra KONGSBERG.
Pahl er tilknyttet Natos «Naval Mine Warfare Center of Excellence». Han jobber blant annet med hvordan man skal få roboter fra flere ulike nasjoner til å samarbeide bedre.
– Problemet i dag er at det ikke finnes noen felles standarder i Nato for operasjoner med autonome farkoster innen miljøkartlegging og minemottiltak, sier Pahl.
Ulike land har ulike verktøy for klassifisering, identifisering og deteksjon av objekter under vann. Skal vi få fullt utbytte av teknologien, er vi nødt til å gjøre noe med det, mener Pahl.
– Vi jobber ikke med standardisering for moro skyld. Vi gjør det for at systemene skal kunne brukes i krig.
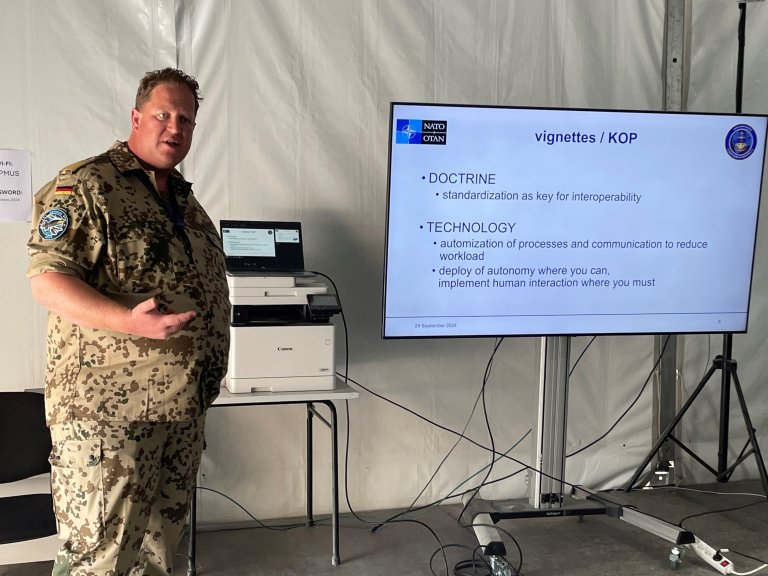
Pahl mener vi må redefinere hvordan man jobber med C2 (kommando og kontroll) i maritime operasjoner der ubemannede farkoster er involvert. Og tempoet må opp.
– De som trenger data, trenger det raskt. Innsamlingen og analysene må bli mer effektive. Hvis data ikke kommer fram til dem som trenger det, har du ikke et system som fungerer, sier Pahl.
Han understreker at det fortsatt må gjøres en omfattende utviklingsjobb før de autonome systemet kan utkonkurrere eksisterende bemannede systemer når det kommer til effektivitet.
– Men under denne øvelsen har vi sett at det er mulig å få ned tiden på et tokt fra 14,5 timer til tre timer ved hjelp av bedre samarbeid, informasjonsdeling og kommunikasjon.

Må stoppe dronetrussel
Det å beskytte seg mot droner vil bli viktig for alle typer overflatefarkoster i maritime operasjoner. Relativt billige droner kan gjøre stor skade på kostbare plattformer. Derfor har det norske teamet med seg droneradarer som er utviklet av KONGSBERG i samarbeid med FFI.
Radaren kan oppdage, klassifiser og spore innkommende droner. På Repmus var droneradarene plassert på FFIs båt Frigg, på et kjøretøy og som en stasjonær sensor i ett av øvingsområdene.
Slike sensorer er livsviktige for Forsvaret, men kan også være nyttige på viktig sivil infrastruktur, som oljeplattformer.
– Her nede får vi testet radaren på en rekke ulike droner. Det er i sin tur med på å gjøre systemet bedre, understreker Stian Kongsvik Berge.

Jon Lauritsen fra Kongsberg skyller Hugin ren for havsalt etter endt tokt. Farvannet under øvelse REPMUS var både grunnere og saltere en Hugin-teamet er vant til.

Runar Økland fra Marinen og Håkon Yssen Rørstad fra FFI gjør seg klar til dagens tokt.

Hugin fraktes ut til området den skal kartlegge med FFIs Frigg.

Hugin styres fra en kontrollstasjon på land. Espen Stange og Geir Espen Schmidt fra Kongsberg Discovery følger med.

Sjef Marinen, flaggkommandør Kyrre Haugen (t.v.) besøkte REPMUS for å høre hva den norske delegasjonen hadde fått til. Til høyre orlogskaptein Bjarte Haugsvær.

Kjenner igjen trusler
Team Norways hovedbidrag var et system for minemottiltak og overvåking av kritisk infrastruktur under vann: Et samarbeid mellom Hugin, en autonom undervannsfarkost (AUV), og Frigg, en autonom overflatefarkost (ASV).
Under øvelsen var Frigg bemannet, men i framtidens system for minemottiltak skal ubemannede fartøyer kjøre med Hugin på dekk. Så settes Hugin ut i det området som skal undersøkes. Den ubemannede båten fungerer som kommunikasjonsrele mellom Hugin og omverdenen.
– Vi ønsker å få de bemannede fartøyene bort fra farlige og sårbare oppgaver og posisjoner, sier Bjarte Haugsvær.
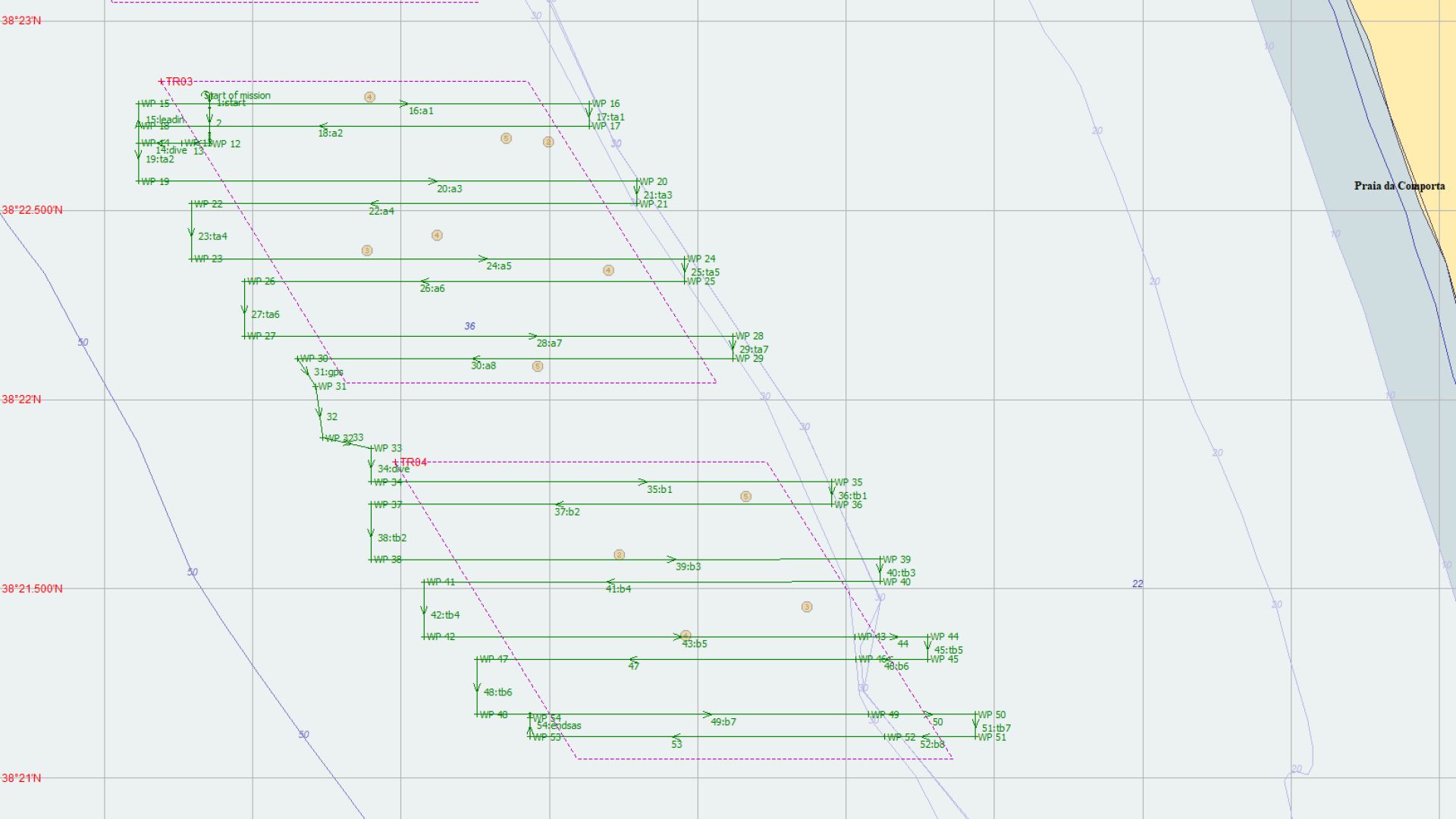
Før Hugin dykker, lages det en rute gjennom området der den skal søke. I dag gjøres dette manuelt. På sikt skal Hugin selv finne den mest fornuftige ruten for å løse oppdraget.

Hugin er utstyrt med avanserte sonarer som bruker lyd for å kartlegge omgivelsene.
En Hugin veier fra 1,3 til 2 tonn. Henriksen mekaniske har laget et system for å sjøsette og hente inn AUVen rett fra en container eller fra ubemannede båter.
Forskere ved FFI jobber for å gjøre Hugin mer selvstendig. På sikt skal Hugin kunne komme tilbake fra tokt med kart over potensielle trusler i et område, og nærbilde av det den har funnet.
I dag er den lært opp til å oppdage miner automatisk basert på sonardata. Men dataene Hugin samler inn må i stor grad lastes ned og analyseres etter at toktet er avsluttet.
Akkurat nå jobber forskerne fra FFI med to nye funksjoner til Hugin: endringsdeteksjon og ytelsesestimering. Disse funksjonene ble testet ut under REPMUS24.
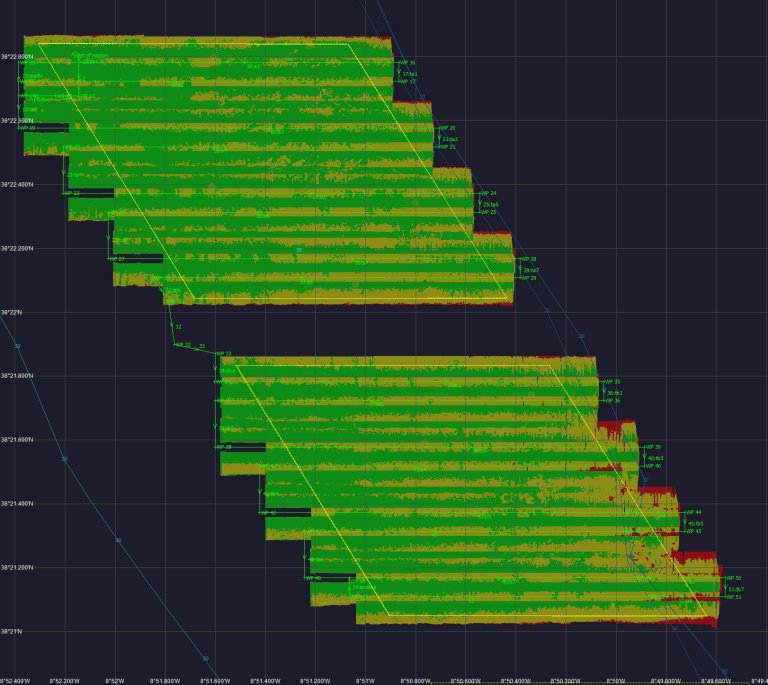
Ytelsesestimering handler om at Hugin selv skal analysere hvor gode data den samler inn.
Under øvelsen i Portugal ble det etter toktene laget dekningskart som viste hvor Hugin hadde fått gode og mindre gode data.
Målet er at Hugin skal kunne gjøre denne analysejobben selv, underveis i et tokt. Da kan Hugin på egen hånd planlegge en ny rute og kjøre tilbake for å få bedre data dersom den ikke er fornøyd med sonarbildene fra en del av området den overvåker.
– Det har ganske stor verdi om vi slipper å vurdere data manuelt. Vi er helt i forskningsfronten på dette arbeidet. Målet er at neste Nato-standard for minemottiltak med autonome undervannsfarkoster vil inneholde vår metodikk, sier FFI-forsker Torstein Sæbø. Han har jobbet med utviklingen av Hugins sonarer og behandling av sonardata siden 2002.
Endringsdeteksjon handler om at Hugin skal klare å oppdage forandringer i et område den har kartlagt tidligere. Hvis den oppdager noe nytt, tar den bilder av det mistenkelige objektet.
– Det er mye enklere og raskere å se etter endringer enn å finne en spesifikk mine eller et mistenkelig objekt. Det gjelder spesielt i farvann langs norskekysten, der havbunnen gjerne er kupert og full av stein, forteller Sæbø.
Hvis man kombinerer automatisk målgjenkjenning med endringsdeteksjon og ytelsesestimering, vil Hugin komme tilbake fra et oppdrag med gode data fra hele området, et kart over potensielle miner og trusler og nærbilder av de mistenkelige objektene.
– Målet er at det skal gjøres minst mulig etterarbeid når vi henter ut dataene Hugin har samlet inn. Når vi skal finne ut om et farvann er trygt, eller om det har vært fiendtlig aktivitet der, er det en fordel at ting går fort, sier Sæbø.
Ubemannede farkoster som patruljerer kabler og rørledninger og ser etter endringer kan også være en del av overvåkingssystem også for sivil infrastruktur.
De mest kritiske punktene trenger kontinuerlig overvåking, men når vi har milevis med kabler og rørledninger får vi ikke overvåket hver meter i sanntid.
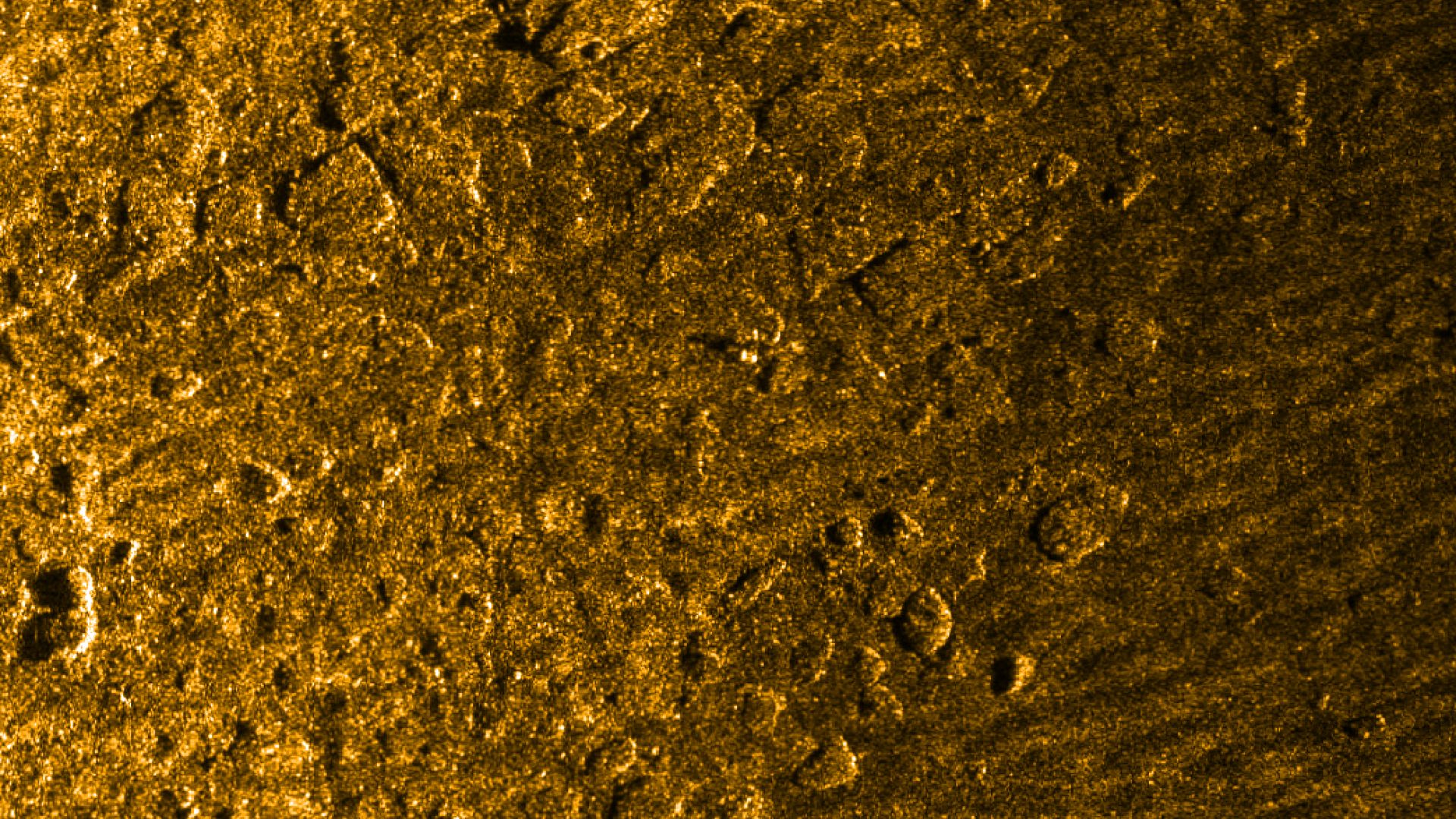
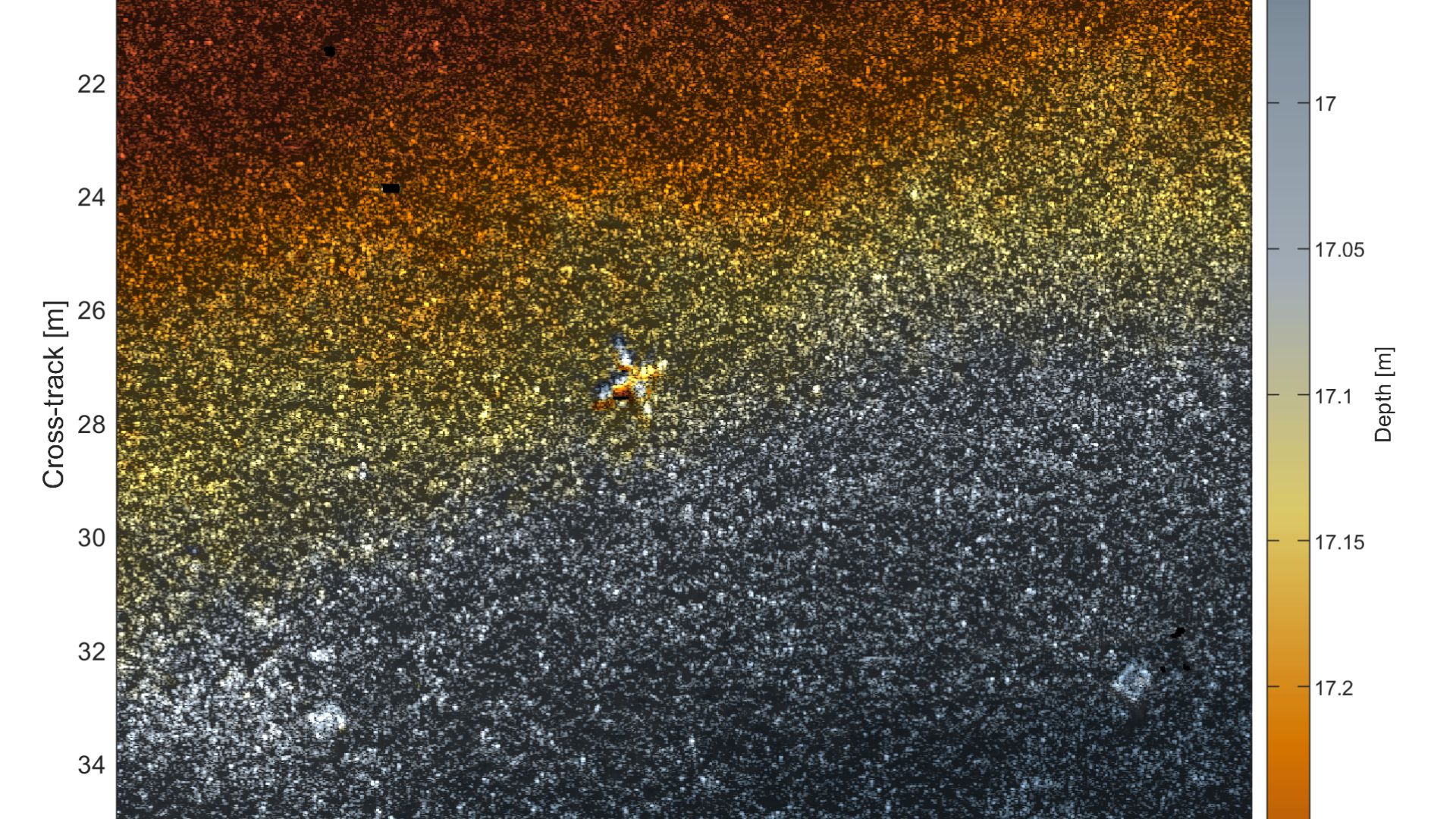
Endringsdeteksjon kan gjøre overvåking og minejakt i norske havområder mer effektivt. Her er sonarbilde fra et område Hugin har kartlagt.
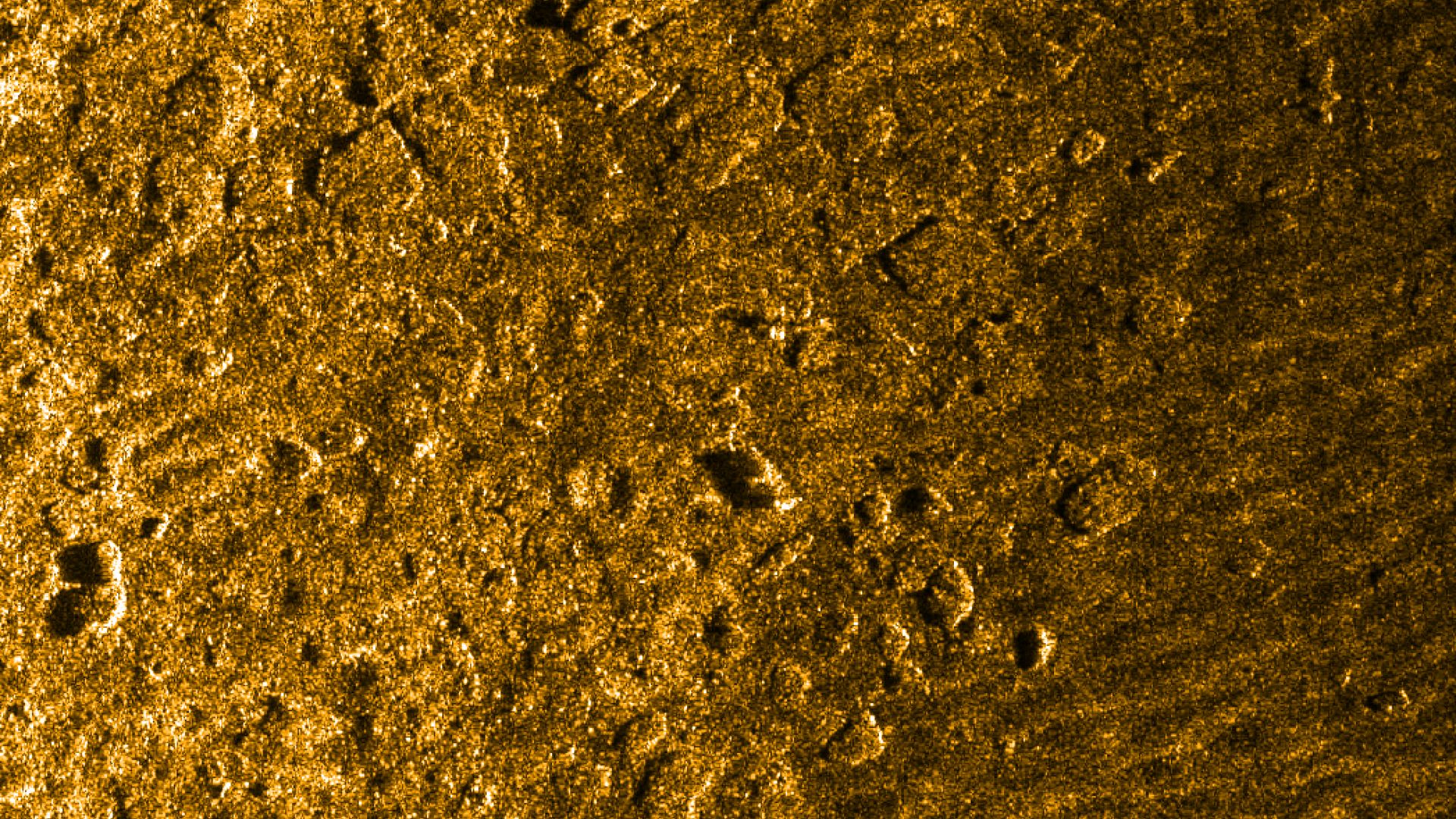
Hugin kjører nytt tokt i det samme området. For et menneske er det vanskelig å se om noe er nytt eller annerledes.
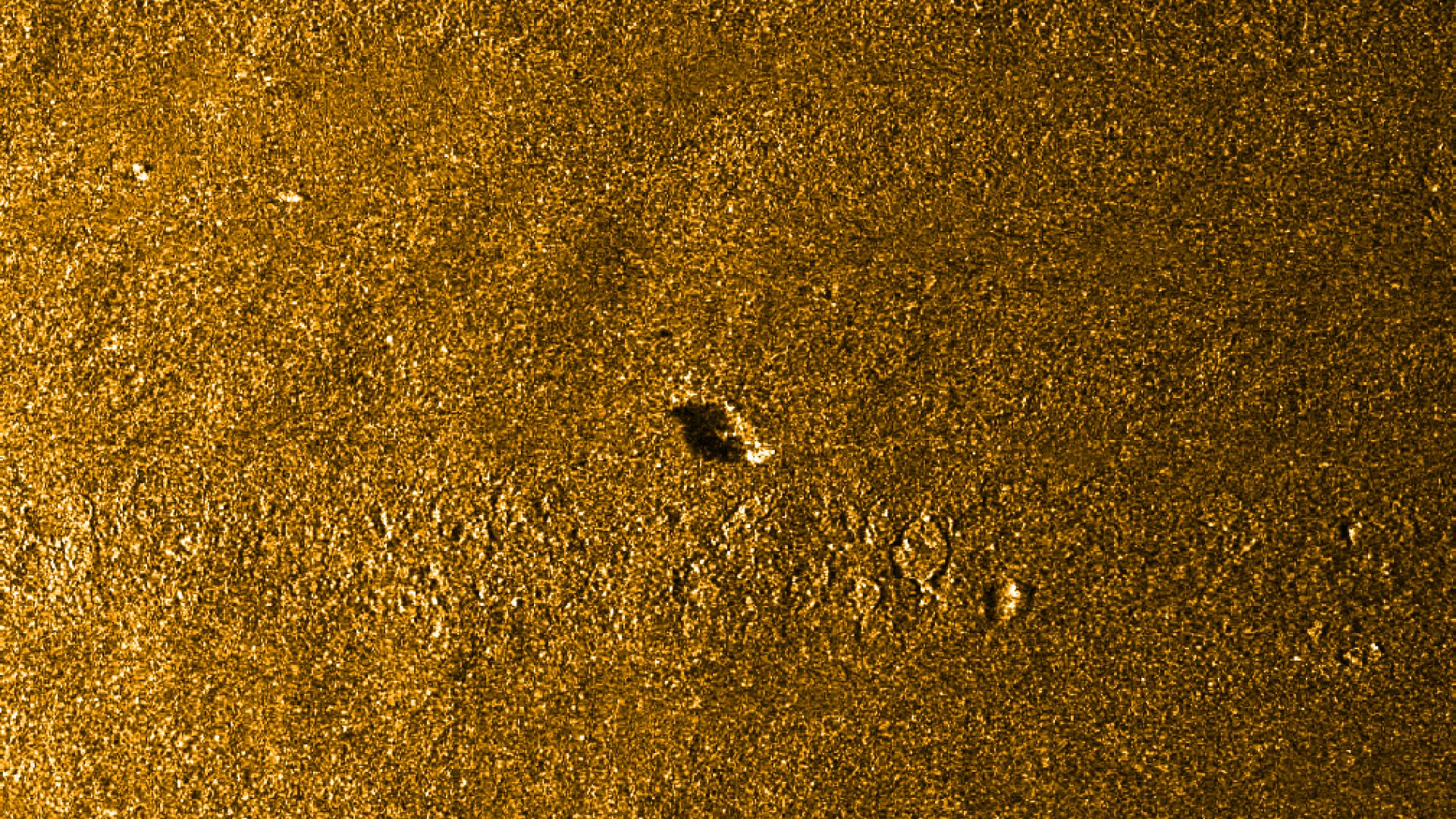
Hvis en datamaskin sammenligner de to bildene og filtrerer bort alt som er «likt», sitter vi igjen med dette bildet.
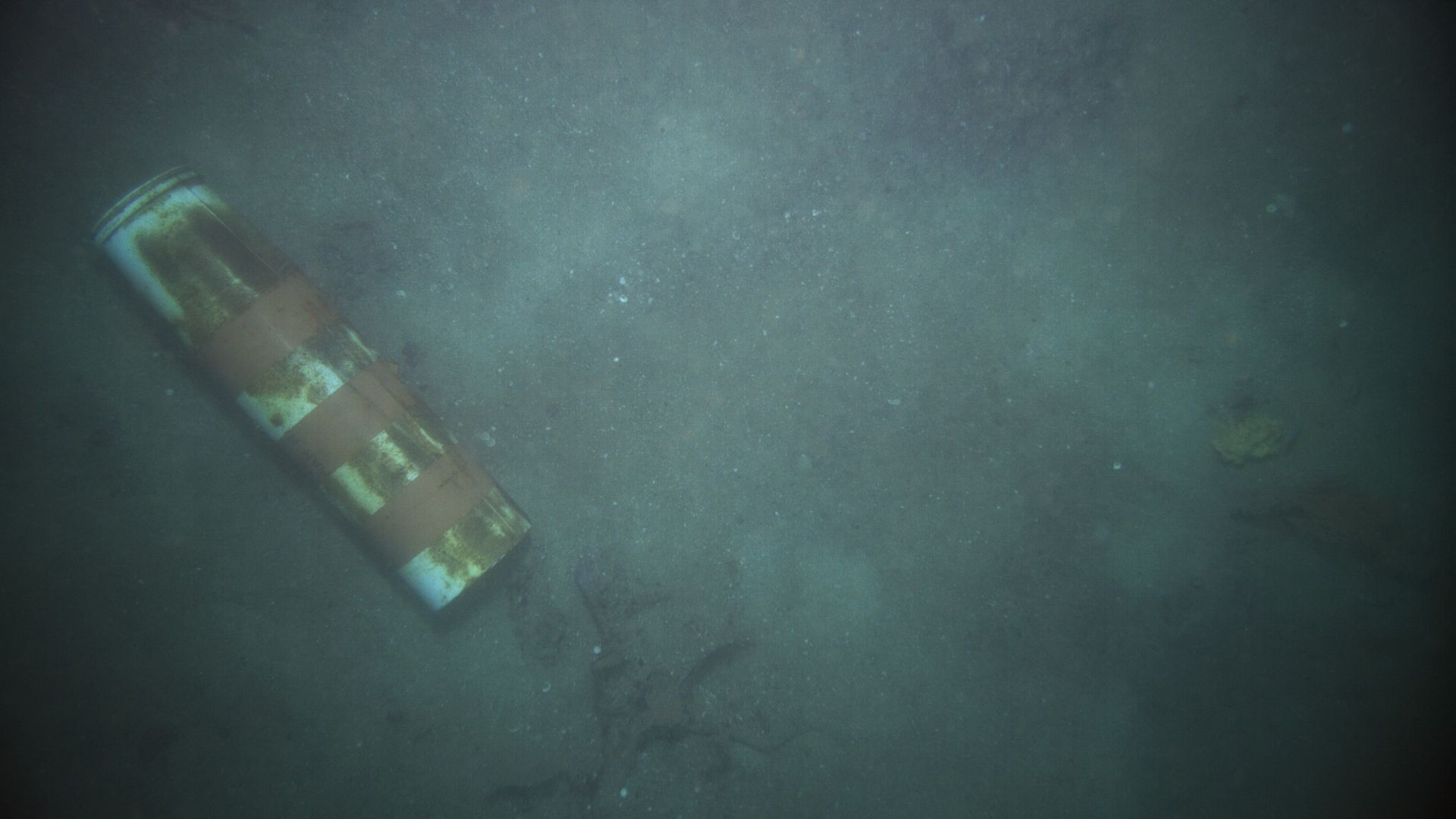
Når Hugin kjører nærmere og for å ta bilder av det nye på havbunnen, dukker denne minen opp.
Målet er at Hugin skal kunne gjøre alt dette underveis i et tokt, uten at data må lastes opp og analyseres av personell på overflaten.
Alt-i-ett løsning
Der andre nasjoner gjerne har ulike AUVer for å løse ulike oppgaver, er tanken at Hugin skal kunne gjøre alt i ett dykk.
- Den kan gå dypt – ned til 6000 meter for de mest avanserte utgavene – samtidig som den kan operere i relativt grunt farvann.
- Den er utholdende og kan dekke store områder på ett tokt.
- Den kan skaffe gode sonardata, skal på sikt kunne analysere dataene selv og skaffe optiske bilder av interessante objekter.

– Noen mener det er sårbart å ha så mange funksjoner i én AUV. Vi mener det er mer effektivt med et kapabelt system som kan gjøre alt i ett dykk. Hvis du først må ned med en AUV med sonar, så analysere dataene og dra tilbake med en AUV som kan ta bilder, mister du verdifull tid.
At Hugin har lang batteritid, gjør den også tyngre og større enn mange andre AUVer. Men det er utviklet et system som gjør at den kan sjøsettes rett fra en container eller en båt som Frigg.
Størrelsen gjør at Hugin får plass til bedre sensorer. Tyngden gjør dessuten at Hugin blir mer stabil i vannet. Da blir sonarbildene bedre.
Sæbø berømmer samarbeidet med KONGSBERG.
– Det hadde ikke være noen Hugin uten utviklingsarbeidet som er gjort ved FFI. Men uten KONGSBERG, som gjorde Hugin til et kommersielt produkt på det sivile markedet, hadde ikke Forsvaret fått nyte godt av denne teknologien. Vi er gjensidig avhengige, sier Sæbø.

